| Welcome | Professional Experience | Projects |
Skills | Resume | Contact |

RECENT PROJECTS
Olin SCOPE
SCOPE is the Olin Senior Capstone in Engineering, which is a 4 credit class that lasts for two semesters. A team of five Olin students, including myself, work with a team from Analogic on cutting edge CT technology. Through this program we can gain corporate experience, work with cutting edge technology, and contribute to the future of medical imaging.
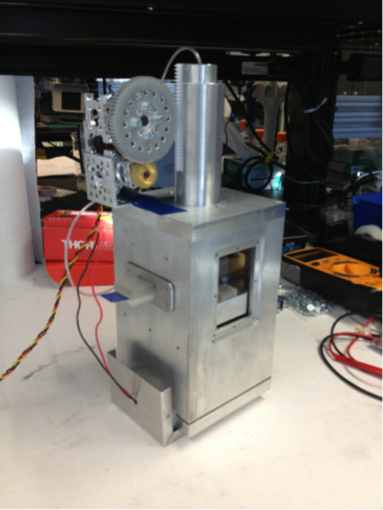
Lens Printer
The Lens Printer project is a Stanford-Olin research project with the intent of creating a printer capable of producing cheap, aspherical, molecularly smooth, micro lenses. These lenses are intended to be used in the Stanford FoldScope project, by Jim Cybulski, under Stanford Professor Manu Prakash. FoldScope is an oragami microscope intended for diagnosis of several diseases in third world countries. Currently these microscopes are capable of diagnosing several diseases including African sleeping sickness, Loa loa, and schistosomiasis. Inexpensive high quality aspherical lenses would add the ability to diagnose malaria, which causes roughly half of all deaths for children under the age of 5 in Uganda. Microscopy is currently the gold standard, according to the WHO, for the diagnosis of maleria due to false frequent positives from Rapid Diagnostic Tests. Aspherical lenses in the FoldScope would likely result in a high enough resolution to diagnose malaria. This work was presented at the 2013 DFD APS conference (DFD Abstract: L34.00002 : Aperture-Embedded Polymer Microlenses for Ultra-Low-Cost Microscopy Platforms (Foldscope), L. Kroo, G. Herring, M. Prakash).
Schottky Source/Drain in CMOS
Parasitic resistance in the source/drain of CMOS devices is a growing problem with continued device scaling. One promising solution to this problem is to replace the doped Source/Drain of these devices with a metal or silicide forming a Schottky barrier junction, instead of the now standard p-n junction, at the source/drain. It is generally concluded that for this solution to provide sufficient drive current, the Schottky barrier height needs to be less than 0.1 eV. There are two potential technologies that demonstrate capability for modulation of the Schottky barrier height: a dielectric layer placed between the metal S/D and the silicon channel forming an MIS diode, which decreases the effects of "Fermi-level Pinning" and allows the Schottky barrier height to be lowered to approximately 0.35 eV using present approaches; or a "dopant segregation" approach within the silicide Source/Drain to cause significant band bending and increase or decrease the Schottky barrier height. Neither of these approaches has as yet provided the capability to reduce Schottky barrier heights less than 0.1 eV for majority carriers.
iLabs
iLabs is system for automating experiments, currently limited to those controlled with labview. The system was created in the KAOS group under Stanford Professor Lambertus Hesselink by a German Masters students, Lars Neustock, and myself. The labview based automated system iterates through all of the states of the controls and records the sensor results and images for every state. The control values for each state along with the sensor results and images can then be uploaded to the iLabs website. The website parses the data into a database and creates a web interface for the information. Then anyone or even thousands of simultaneous users can access the experiment and control it as if they were sitting at the experiment with the Labview based control system. In this way, anyone can gain access to cutting edge experiments. It's unrealistic to supply every student with high power laser systems, micro-fabrication capabilities, and optical tables; but any student with Internet access could use this system to virtually operate an experiment with all of these components. I worked with Lars on the automation algorithm. Personally I managed the data upload and parsing, system security, website back-end on Google App Engine, and optical experiment setup/hardware automation.
Bayesian Networks
Bayesian networks can be used to predict the values of unknown variables in large data sets. A learner program designs a network of nodes, representing variables, and arrows, representing correlations. For a single instance of data the known variables are fed into the network and the probability of values for unknown variables are computed using Bayes equation. Bayesian networks have the advantage of learning as new data becomes available and showing correlations and possible causations between variables. Also these networks can take into account non-linear correlations between variables. For a Computer Architecture project, we wrote a python program to produce and simulate such a network then tested the program using data from Alaska Airlines. We were able to produce fairly accurate probability distributions of missing variables. For instance we could find how late an airplane was likely to be considering, among other things, the number of service events on that airplane, how long the flight was scheduled to be, or what the weather conditions were.
Material Science of Sterling Silver
Sterling silver is generally prized for both its aesthetic value and its material properties since it’s harder than pure silver. Also perhaps one of the most famous silversmiths in history of Paul Revere. A group of 4 Olin students, myself included, worked to find why sterling silver is 7.5% copper instead of another concentration, what methods Paul Revere might have used, and how silver working affected Revere’s life. We were viewing material properties in a historical context and historical events in the light of available materials and technologies. In the process we researched original texts, cast, rolled, forged, trimmed, tempered and polished silver-copper alloy spoons, and performed microscopic crystallography on samples in order to view the effects of these processes and mixtures.

Swarm Lightbots
For the Principles of Engineering class at Olin we built a set of three robots that could be used in long exposure photography. Each robot had a microcontroller, wheel encoders, wireless communications, and two driving motors. Since this was a learning experience for all four members on our team and because we were building three robots on a 250 dollar budget, we decided to build several of our systems from scratch. The most time consuming part was designing, testing, and building the circuits including motor controllers, wheel encoders, and Arduinos made from scratch. Since I was the main circuits person on our team I spent a large portion of my time on this project during the fall 2011 semester. More information, including system diagrams, circuit diagrams and descriptions, is available at our project website.
Stock Market Signal Analysis
The stock market project was an attempt to find patterns within the stock market over relatively long terms, about a month or two. The basic idea was that each sector of the market and thus each individual stock had some basic effect on certain other stocks. I was working on this project with two other Olin College students. We didn’t really have any hope of success but it was an interesting idea. Also this type of program could be used when examining signal information from sensor systems to locate the source of any problems might be or if one signal was in some way affecting other signals such as in cross-talk, capacitive connection, or induction loops. While approaching the problem we read several papers in which the authors stated some problems with using data mining in connection with the stock market. For instance, there can be two stocks that seem very similar signals but have very different causes and there is no real meaning to the connection. In order to take this into account we decided to use network analysis to find the most central or important stocks within the market. We used a cross-correlation to find the Pearson coefficient of correlation and indicators for the time delay between the causes noticed in one stock and the effects on the other stock in the connection. The probability of that high of a coefficient ofcorrelation was then also calculated. This information was used to create one number for each stock indicating the direction that it would probably move. We found that stocks that are less central in the network, or less important, are more predictable by this method. The most interesting attribute of this program was that it works best at indicating which direction the market will move when one sector of the market is pulling the market up or down. The instance of this that I found most interesting was when it found indicators for the 2008 recession.

Olin Sparc
A small team of students from Franklin W. Olin College of Engineering visited elementary and junior high schools in the Needham, MA community to present science demos and hands-on projects to engage students in the most remarkable aspects of the subject they are studying. This non-profit organization put together presentations that are truly innovative and exciting that they share with classes of 4th through 7th graders. Through our efforts, we hope to help foster a new generation of inquisitive, bright young people who will contribute to the world. More information is available at our website.

Omni-directional Motor
I had the idea that the metal ball of a caster could be replaced with a plastic ball that had conducting copper paths on the surface and the whole caster could be turned into an induction motor. To test the viability of this idea I wrote a computational simulation. It used a numerical fourth order differential equation solver with simplified calculations for flux and magnetic force. The results showed that it is possible to place a torque on the rotor (the plastic sphere). However, a uniform torque cannot be applied by the magnetic field if the rotor has finite conduction paths. This means that while the simulation does act as a validation of the basic idea, it also shows complications of such a design. A potential solution to the problem of non-uniform torque would be to have a more complex geometry of the rotor conductors or a continuous conductor on the surface of the rotor. This type of omni-directional motor would be capable of moving objects in any direction along the plane that they were on. Some limitations of casters include the inability to support larger weights, but this design should work for moving smaller objects such as small robots.
Variable Thrust Rocket Simulation
This was the third and final project that I did for the Modeling and Simulation of the Physical World class at Olin College of Engineering. The goal was to write a computer program that would calculate the amount of fuel was required to launch a given payload into orbit and whether it was energy efficient to use electromagnetically assisted launch for rockets. The basic premise was that large amounts of fuel are burned simply to get a rocket off the launchpad with a relatively small initial velocity. An electromagnet could accelerate the rocket without spending energy on accelerating fuel to initially accelerate the rocket. However it was also theorized that not all the energy should be supplied by an electromagnet because the energy required goes up with the square of the velocity. Also the rocket would have an extremely high velocity while traveling through the densest part of the atmosphere. This would cause large energy loss due to air drag. The results of the simulation supported this idea and the model was validated to be within an order of magnitude of rocket flights to earth orbit. This project was completed in four weeks with two other individuals while simultaneously working on other projects so certain simplifications were made.


Transporter Toy Project
The transporter toy was the second project for the Design Nature class at Olin. The goal was to complete the design process for the creation of a toy for children. This project, in a group of five, involved a number of steps including ideation, goal formulation, design, prototyping, evaluating, redesign, and producing a final prototype. The final prototype was then evaluated by 20 fourth graders. Each group of 20 fourth graders was assigned a few projects to evaluate with over 100 fourth graders participating. The requirements for the toy were that they had to be safe, biologically inspired, only three servos could be used, and all prototyping had to be built on a budget under 50 dollars. Our team was assigned to build a toy that was biologically inspired by a kangaroo. To this end, we designed a kangaroo that was capable of punching, moving forwards and backwards, steering, and had a little baby kangaroo that would jump out of its pouch. The first three of the previously stated motions were accomplished using servos connected to various mechanical systems and controlled by a remote control. The baby kangaroo had a magnet inside of it that caused it to move when the electromagnet in the kangaroo was energized by contacts on the kangaroo's feet coming in contact with a power circuit. The fourth graders evaluated our toy as being the second most fun to play with compared to the rest of the toys that were presented.
Passively Heated House Simulation
Since energy is in higher demand in recent years it's worthwhile to find ways in which to conserve energy wherever possible. One such place that energy could be conserved is in the heating and cooling of houses. We designed a simulation to test parameters of a house, to determine a thermally efficient design. The sun was used as an energy source such that more sunlight entered during the winter than during the summer. This was accomplished by designing an awning over the south facing glass wall of the house. The awning blocked the sun during the summer because of the high angle of the sun while during the winter most of the sunlight could enter since it was 47 degrees closer to the horizon. The model included temperature and sun variations over the course of each year and each day. The north-south and east-west dimensions of the house were swept to show how temperature changed. By the end of the project we demonstrated that with enough insulation and insolation (measure of solar radiation) that it was viable to build a passively heated house in the Boston area. We also found basic design parameters for a passive house.